日本語
English
注册
|
登录
下次不再提示
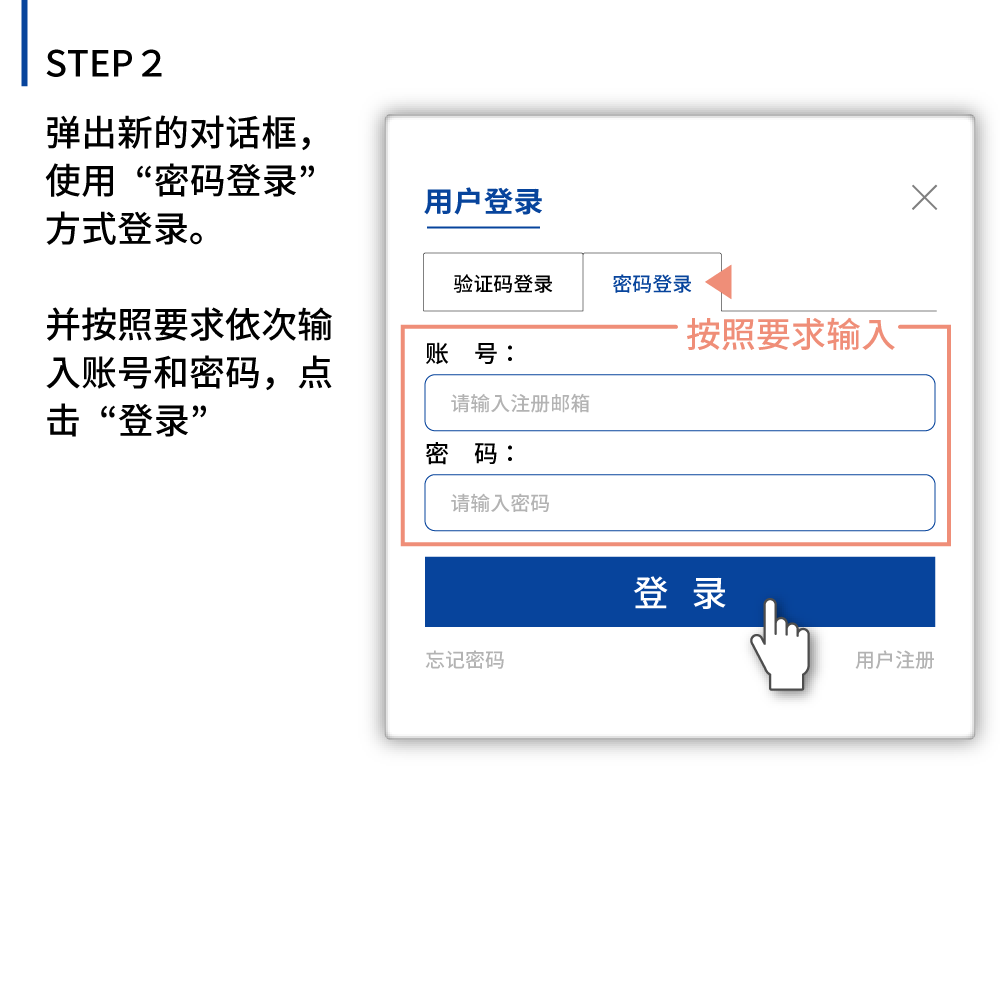
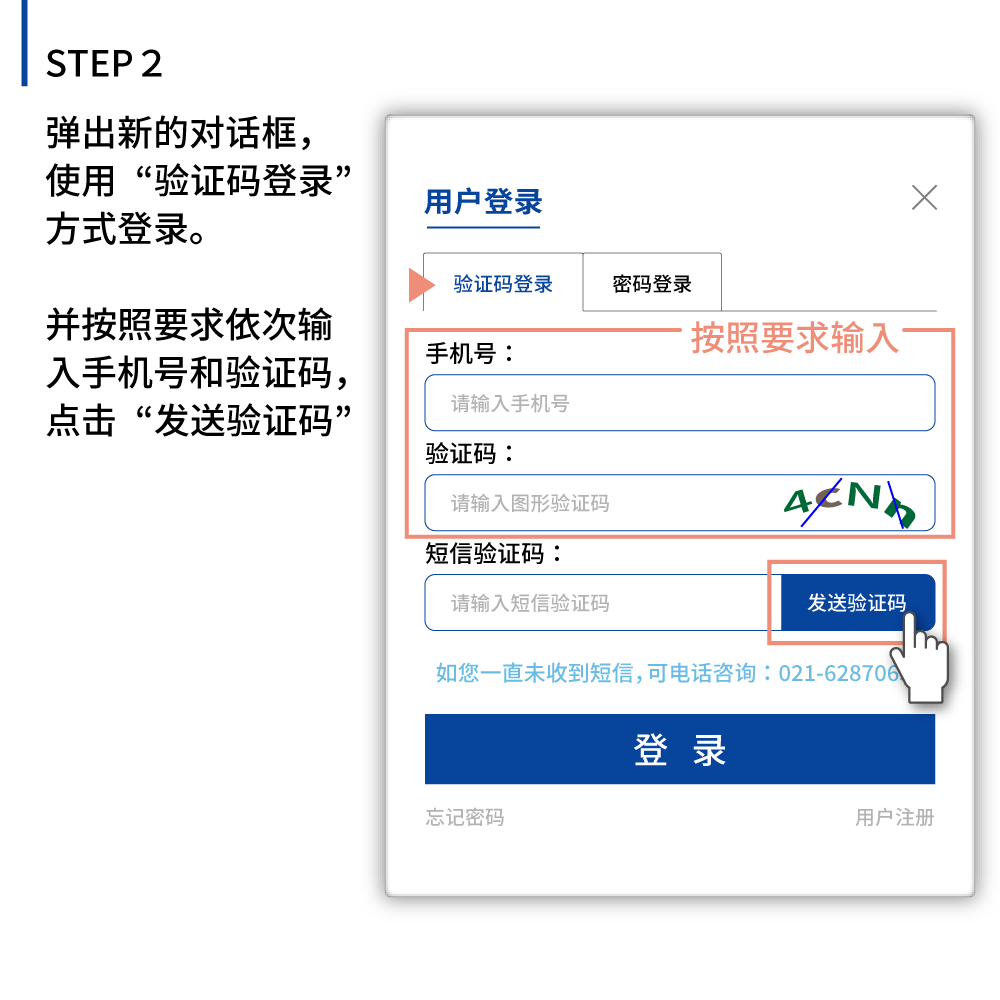
用户登录
如您忘记注册的手机号,请使用密码登录
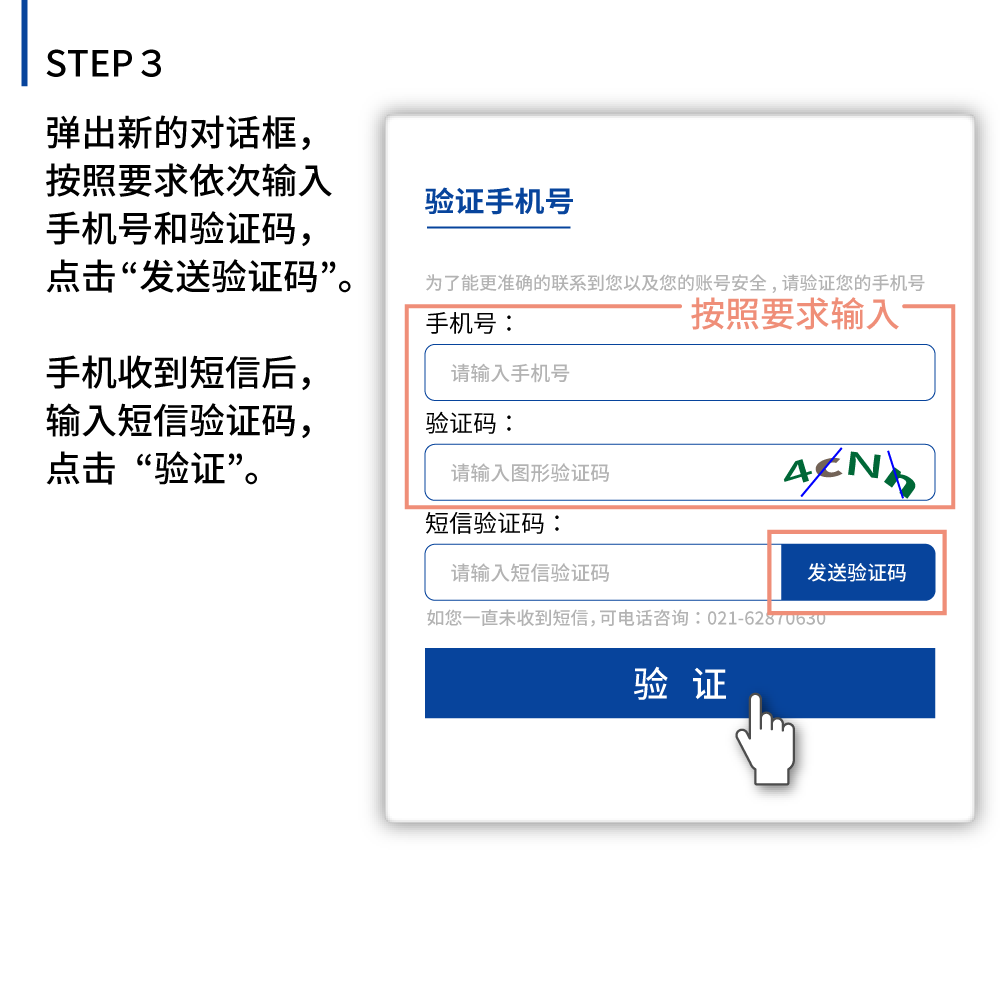
手机号:
验证码:
短信验证码:
发送验证码
如您一直未收到短信,
可电话咨询:021-62870630
账 号:
密 码:
忘记密码
用户注册
绑定账号
验证手机号
绑定手机号
产品一览
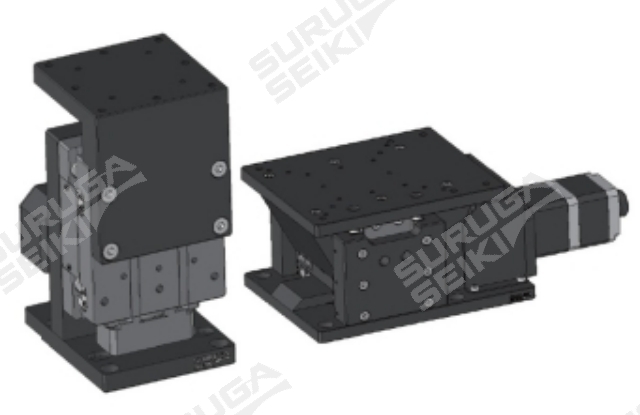
自动滑台
手动滑台
光学传感器
光纤耦合
用户支持
FAQ
关于骏河精机
新闻中心
产品选择
初次选购者·想了解产品者·已确定产品规格者,都可以在此找到合适的产品。
自动滑台
手动滑台
光学传感器
光纤耦合
新产品
带编码器高精度滑台
自动水平面Z轴滑台
自动旋转滑台
自动薄型通孔型XY轴
XYθ轴滑台
自动Z轴滑台
带电磁刹车
资源中心
目录申请
骏河免费给客户提供产品目录
按规格检索
按移动量、按耐负载、按精度、按速度
来检索您需要的产品。
各种下载
可在此各类产品的使用说明书、
案例编程、CAD数据等内容。
目录下载
可在下载PFD电子目录
常见问题
这里介绍使用滑台时经常提到的问题。
选型困惑时,使用困惑时请参考。
注意事项
2024-04-19
2024年劳动节放假通知
2024-01-31
2024年春节放假通知
2023-12-25
2024年元旦放假通知
2023-09-20
2023年中秋国庆双节放假通知
2023-08-31
第24届中国国际光博会参展10C31
更新情报
2013-02-26
驱动器(SD5107P2-A3)替代机型的介绍
导航
⋙ 首页
⋙ 产品一览
⋙ 订购方法
⋙ 目录申请
⋙ 联系我们
⋙ 借用样机(免费)
⋙ 利用规约
⋙ 个人信息及客户信息保护方针
⋙ 骏河精机(日本)
联系我们
受理时间:9:00~18:00(周一~周五,不包括中国法定节假日)
上海总公司
上海市静安区汶水路40号
1号库1号楼007A室
联系电话:
021-62870630
FAX:021-62870639
深圳分公司
深圳市南山区创业路
保利大厦2508室
联系电话:
0755-26428735
FAX:0755-26429621
武汉办事处
武汉市武大园一路11号
豪迈大厦2栋101室
联系电话:
027-65528292
FAX:027-65528292
请关注我们
版权所有(C) 2024 骏河精机科技(上海)有限公司保留所有权利
沪ICP备11040196号
沪公网安备31010602000801号
用户
TEL
客服
报价
0
对比
0
























 上海总公司
上海总公司
